스타-델타(Y-△) 기동 운전방법 / EOCR의 설명
스타-델타(Y-△) 기동 운전방법 / EOCR의 설명

1. 스타-델타(Y-△) 기동 운전
3상유도전동기의 기동법으로서 약11kw까지는 농형 유도전동기를 많이 쓰는데, 이 전동기는 기동할 때 고정자를 Y형 결선으로 하여 운전하고 충분히 가속된 후 △결선으로 바꾼다.
Y형 선전류는 △형으로 기동할 때 보다 1/3로 줄어들어 과전류에 의한 전기자 소손위험이 없다. 또 토크도 전압의 2승에 비례하므로 중형 이상에서 기동토크를 필요로 하는 유도전동기에 필요하다.
< Fig01. 스타-델타 시동기의 접속도예(3접촉기) >
Y-△기동
-△결선으로 운전하는 전동기를 기동시만 Y로 결선을 하여 기동전류를 직입기동시의 1/3로 줄임
-최대 기동전류에 의한 전압 강하를 경감시킬 수 있다.
-기동 후 운전으로 전환될 때 전전압이 인가되어 전기적 기계적 쇼크가 있다.
-5.5KW이상의 전동기로 무부하 또는 경부하로 기동이 가능한 것.
2. 스타-델타(Y-△) 기동 운전 – 동작 설명
< Fig02. 스타-델타 시동기의 동작 >
3. 스타-델타(Y-△) 기동 운전 - 시뮬레이션
< Fig03. 스타-델타 시뮬레이터 >
4. EOCR - 전자식 과전류 계전기
EOCR(전자식 과전류 계전기)는 열동형 계전기(Th) 대용품으로 개발되었다.
EOCR은 전류를 CT로 감지하여 동작하는 것으로 자체 소비전력이 0.2~1W로 열동형 계전기의 소비전력 2~12W에 비해 아주 적다.
열동형 계전기는 주로 과부하로 보호되는 것이지만
EOCR은 과부하, 결상, 역상 보호에서 현재 개발된 디지탈 EOCR은 과부하, 저부하, 결상, 역상, 불평형, 지락, 단락, 구속 등 여러가지 기능이 있는 것은 물론이고 조정범위가 전동기 특성에 맞게 조정 할 수 있어 전동기 소손 방지는 완벽에 가깝다고 볼 수 있다.
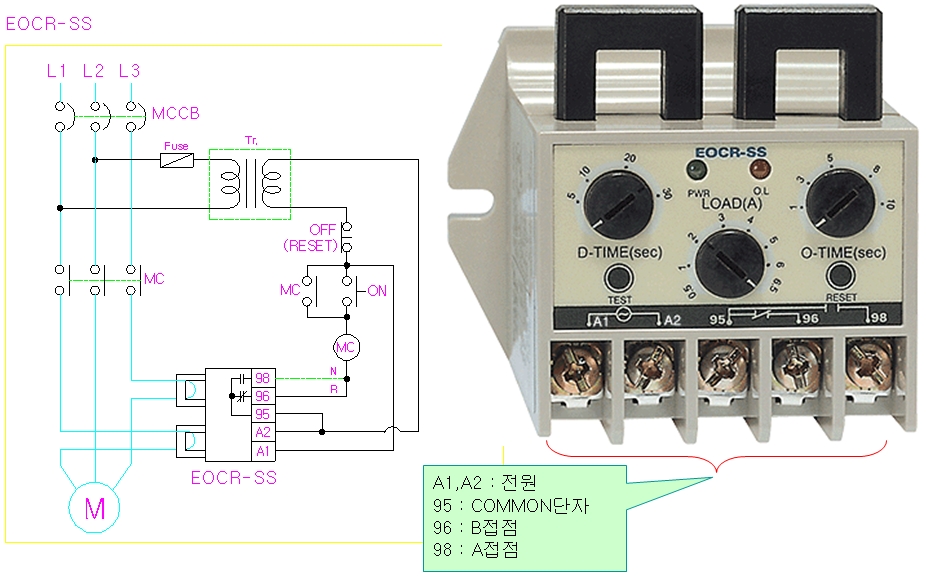
< Fig04. EOCR의 접점 >
'공사교육자료 > 전기 - 공사교육' 카테고리의 다른 글
| 전기회로기초(옴의법칙/와트의법칙) (0) | 2024.03.01 |
|---|---|
| 전동기의 정·역운전회로, 지연동작회로 등 (0) | 2024.02.29 |
| 시퀀스 제어(Sequence controll) - 인터록회로 / 자기유지회로 등 (0) | 2024.02.27 |
| 시퀀스 제어기기(Sequence control device) - 타이머 / 전자개폐기 / 열동형과부하계전기 등 (0) | 2024.02.26 |
| 시퀀스 제어기기(Sequence control device) - 푸쉬버튼스위치 / 릴레이 등 (0) | 2024.02.20 |
