DC모터(브러시형) vs BLDC모터(브러시리스)
DC모터(브러시형) vs BLDC모터(브러시리스)

1. 구조적 차이
1) DC모터 (Brushed DC Motor)

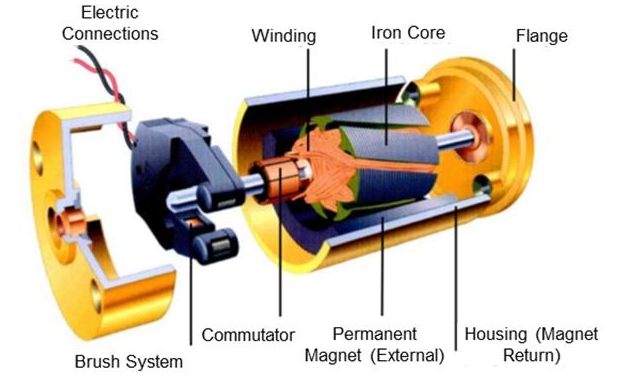
1-1) 구성요소 (세부)
① 고정자 (Stator)
· 영구자석 또는 계자권선
· 역할: 고정된 자기장(자속 Φ) 생성
② 회전자 (Rotor, Armature)
· 철심 + 슬롯 + 권선(Armature winding)
· 권선이 실제로 전류를 받는 부분
· 전류가 회전자 내부로 직접 들어감
③ 정류자 (Commutator)
· 구리 세그먼트(분할 링)
· 회전하면서 전류 방향을 바꿔줌
· 교류처럼 바뀌는 토크를 한 방향 토크로 정류
④ 브러시 (Carbon Brush)
· 정류자와 접촉하는 탄소 재질
· 외부 전원을 회전자에 전달
· 마찰 + 스파크 + 마모 발생
1-2) 구조적 본질
· 전류 경로 : 외부 → 브러시 → 정류자 → 회전자 권선
· 자속 경로 : 고정자 → 공극 → 회전자 → 다시 고정자
1-3) 요약
· 전류가 도는 부분이 회전자
· 정류가 기계적으로 이루어짐
2) BLDC모터 (Brushless DC Motor)


2-1) 구성요소
① 고정자 (Stator)
· 3상 권선 (U, V, W)
· 슬롯에 집중권 또는 분포권 형태
· 전류는 항상 여기서만 흐름
② 회전자 (Rotor)
· 영구자석 (NdFeB 등)
· 구조 유형 : SPM (표면부착형) / IPM (내부매입형)
· 전류 없음 → 발열 거의 없음
③ 위치센서 (Hall Sensor) 또는 센서리스
· 로터 위치 검출
④ 인버터 (외부)
· DC → 3상 AC 변환
· 전자식 정류 수행
2-2) 구조적 본질
· 전류 경로 : 인버터 → 고정자 권선
· 자속 경로 : 로터 자석 → 공극 → 고정자 → 다시 로터
2-3) 요약
· 전류가 흐르는 부분이 고정자
· 정류가 전자적으로 이루어짐
2. 동작 원리 비교
1) DC모터

1-1) 기본 물리 법칙 (로렌츠 힘)
도체에 전류가 흐르고 자기장 안에 있으면 힘 발생:

· B : 자속밀도
· I : 전류
· L : 도체 길이
이 힘이 회전력(토크)으로 변환됨
1-2) 실제 동작 과정
① 전류 인가
· 전원 → 브러시 → 정류자 → 회전자 권선
② 자기장 형성
· 고정자: 일정한 자속 Φ 생성
· 회전자: 전류로 인해 자기장 생성
· 두 자기장이 상호작용
③ 토크 발생
· 권선 양쪽에서 반대 방향 힘 발생
· 회전자 회전 시작
④ 문제 발생 (중요)
· 180° 회전하면 토크 방향이 반대가 되어 멈춤
⑤ 해결 = 정류 (핵심)
· 정류자가 회전하면서 전류 방향 자동 반전
· 항상 같은 방향 토크 유지
1-3) 핵심 구조적 의미
· 전류도 회전자에 있고
· 자속도 회전자에 존재
· 기계적으로 전류 방향을 바꿔야 함
1-4) 특징 요약
· 자연스럽게 자기 정류(Self-commutation)
· 단순하지만 마찰/손실 발생
2) BLDC모터

2-1) 핵심 개념
회전하는 자기장을 만들어 로터를 끌고 간다.
① 전류 → 회전 자기장 생성
· 3상 전류 인가 : Ia, Ib, Ic → 회전자기장생성
· 고정자에서 자기장이 회전
② 로터 반응
· 로터 = 영구자석
· 자기장은 항상 최소 에너지 상태로 정렬하려 함
· 회전 자기장을 따라 회전
③ 위치 기반 제어
· Hall sensor 또는 센서리스 방식
· 로터 위치를 실시간 파악
④ 전자 정류
· 인버터가 타이밍 맞춰 전류 스위칭
· 기계적 접촉 없음
· 지속적인 회전 유지
2-2) 핵심 구조적 의미
· 전류는 고정자에만 있음
· 로터는 자석만 존재
· 전자적으로 회전장을 만들어 해결
3) 동작 원리 본질 비교
|
구분
|
DC모터
|
BLDC모터
|
|
토크 생성
|
도체에 작용하는 힘
|
자석 정렬 토크
|
|
정류 방식
|
기계식
|
전자식
|
|
자기장
|
고정 + 회전자 생성
|
회전 자기장
|
|
제어 방식
|
수동적
|
능동적
|
3. 성능 및 효율 비교
|
항목
|
DC모터
|
BLDC모터
|
|
효율
|
낮음 (70~80%)
|
높음 (85~95%)
|
|
발열
|
큼
|
적음
|
|
소음
|
큼 (브러시 마찰)
|
매우 적음
|
|
수명
|
짧음 (브러시 마모)
|
길음
|
|
유지보수
|
필요
|
거의 없음
|
· DC : 브러시 마찰 + 스파크 손실
· BLDC : 비접촉 → 손실 최소
4. 제어 특성
1) DC모터
· 속도 제어: 전압 제어 (V ∝ 속도)
· 토크: 전류에 비례 (T ∝ I)
· 제어 매우 단순 (PWM만으로도 가능)
· 정밀 제어 어려움
· 고속에서 브러시 문제 발생
2) BLDC모터
· 속도/토크 모두 정밀 제어 가능
· FOC(Field Oriented Control), PWM, 벡터제어 사용
· 고효율 + 고정밀
· 산업용, 로봇, 전기차 필수
5. 유지보수 및 내구성
1) DC모터
· 브러시 교체 필요 (소모품)
· 스파크 → EMI(전자파 간섭) 발생
· 방폭 환경 부적합
2) BLDC모터
· 마모 부품 거의 없음
· 밀폐 구조 가능
· 방폭, 청정 환경에 유리
6. 비용 구조
|
항목
|
DC모터
|
BLDC모터
|
|
초기 비용
|
저렴
|
비쌈
|
|
유지비
|
높음
|
낮음
|
|
제어기
|
불필요
|
필수
|
즉, 단기적으로 사용시는 DC모터가 유리하고 장기적으로 사용시에는 BLDC가 경제적임.
7. 적용 분야
1) DC모터

① 자동차 보조 구동계
ON/OFF 중심 동작이며 정밀제어가 불필요하고 비용이 저렴함.
· 와이퍼 모터
· 파워윈도우
· 시트 조절 모터
② 완구 및 소형 기기
저가 + 구조단순 및 배터리 직결 가능함.
· RC카
· 장난감
· 간단한 팬
③ 휴대용 전동 공구 (저가형)
순간 토크가 크며 제어회로가 단순함.
· 드릴
· 전동드라이버
④ 산업 단순 구동
일정 속도만 유지하면 되며 유지보수의 허용이 가능함.
· 소형 컨베이어
· 밸브 구동기
⑤ 교육/실험용
구조적으로 이해하기가 쉬움.
· 모터 원리 교육
· 기본 제어 실습
2) BLDC모터

① 전기차(EV) 및 e-모빌리티
고효율(주행거리 직결), 고출력/고속, 정밀 토크제어의 필요성 등의 이유로 해당기기에 적합.
· 전기차 구동 모터
· 전동 스쿠터
· 전기 자전거
② 드론 및 항공
고속회전, 무게 대비 출력 우수, 빠른 응답성등의 이유로 해당기기에 적합.
· 드론 추진 모터
· RC 항공기
③ 가전 (인버터 제품)
에너지 절감, 저소음 요구성, 장시간운전 등의 사유로 해당기기에 적합.
· 에어컨 압축기
· 냉장고 컴프레서
· 세탁기
④ 산업용 자동화 / 로봇
위치 / 속도 정밀제어, 반복 정밀도 필요성, FOC제어 가능함으로 해당기기에 적합.
· 산업용 로봇
· CNC 서보모터
· 자동화 설비
⑤ IT / 정밀기기
진동 최소화, 장시간 무고장 운전, 정밀 속도유지 등의 이유로 해당기기에 적합.
· HDD 스핀들 모터
· 냉각 팬 (서버용)
· 반도체 장비
⑥ 의료기기
저소음, 고신뢰성, 유지보수 최소화등으로 해당기기에 적합.
· 인공호흡기
· 수술 장비
'공사교육자료 > 전기 - 공사교육' 카테고리의 다른 글
| 전기배관의 종류 및 특징 (0) | 2026.04.08 |
|---|---|
| 전기장 / 자기장 / 전자기파의 관계 (0) | 2026.04.07 |
| 유입변압기(Oil Transformer) 상태 점검방법 (0) | 2026.04.03 |
| 고압선로의 영향&대책 완전정리!! (0) | 2026.04.02 |
| 케이블 수트리현상(Water Treeing) 대책 (0) | 2026.03.31 |
