자동제어의 기본개념 - 보상기
자동제어의 기본개념 - 보상기
1. 보상기
1) S-평면의 좌반부에 있는 pole-zero는 cancel 해도 되지만 우반부의 있는 pole-zero는 cancel 하지 말아야한다. 그 이유 중 하나는 우반부의 pole-zero는 실제시스템의 정확한 pole-zero가 아니기 때문이다. 예로 들어 전달함수의 zero가 우반부에 있을 때 이 zero를 소거시키기 위해서 전달함수의 분모에 zero와 같은 위치를 가지는 pole을 첨가하면 이론적 으로는 zero와 pole이 소거되었지만 실제적으로는 시스템에 우반부에 존재하는 pole을 첨 가시키는 오류는 범한 것이 된다.
2) PID controller

① KD즉, KP의 효과
비례기가 첨가된 전달함수
-ωn의 길이가 길어졌다---> band width 가 크졌다.--->rise time 이 작아졌다.
---> overshoot가 증가.
② KP=0즉, KD의 효과
미분기가 첨가된 전달함수되어
overshoot를 줄인다.
③ KI의 효과 즉, 적분기의 효과

* 정상상태 편차

i) 정상상태 편차를 Zero로 한다.
ii) 적분기는 저역통과 필터로 rise time이 커진다.
iii) overshoot를 감소시킨다.
3) PID tuning method
실제로 PID controller를 사용하여 제어하는 경우 PID의 gain값을 정하기는 어렵고 trial and error method를 해야한다. 그래서 Ziegler-Nichols는 요구되어지는 specification은 만족시키지 않지만 “good behavior"를 하는 PID gain을 tuning하는 방법 개발했다.
① KD=KI=0로 두고 KP를 조절하여 oscillation이 일어날 때 (i.e. , 페루프의 극이 허수축상에 존재)까지 KP를 증가시킨다. 이때의 KP를 Km라하고 주파수를 ωm이라 한다. Km, ωm을 매개변수로 해서 PID gain을 구한다. 그 관계는 다음과 같다.

4) lead-lag 보상기
① (0<a<b) 일 때 K(S)는 진상 보상기
② (a>b>0)일 때 K(S)는 지상 보상기
2. 설계 및 보상 기법
성능 사양이 시간영역 성능 측도, 즉 상승시간, 최대 오버슈트 ,정착시간으로 주어지거나, 또는 주파수 영역 성능측도, 즉 위상여유, 이득여유, 공진 첨두치, 대역폭으로 주어질 때는 선택의 여지가 없이 근궤적법이나 주파수응답을 기본으로 한 고전적 접근법을 사용해야한다.
3. 예제로 고전제어의 개념을 이해
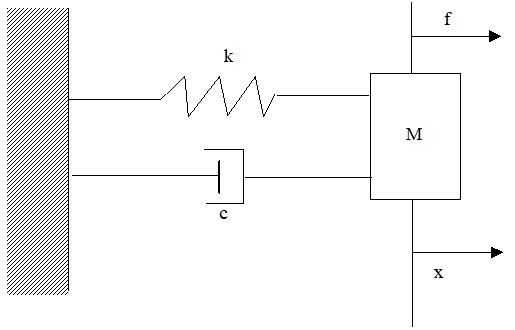
< Fig01. SISO System >
위의 단일 입력 단일 출력시스템의 운동방정식을 구하면 다음과 같다.

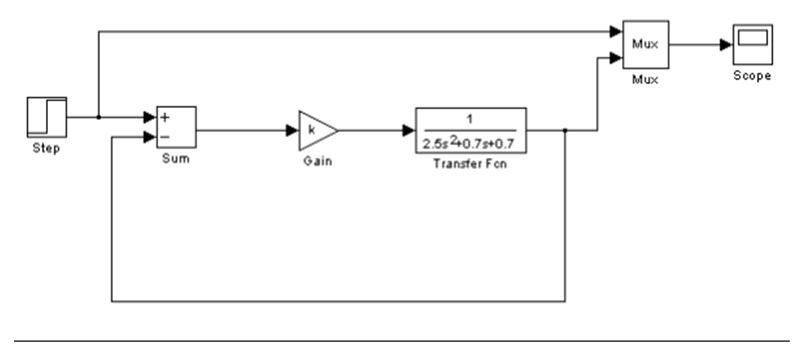
< Fig02. gain K가 첨가된 Block Diagram >

< Fig03. k의 변화에 대한 근궤적 >
위의 시스템은 절대적인 안정도를 가지고 있다. 즉, K값을 어떻게 설정 해도 특성방정식 의 근이 S-plane의 우반부로 이동하지 않는다.
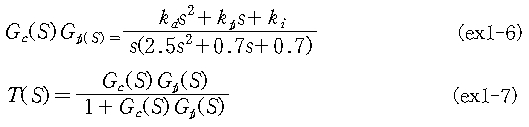
b) PID gain이 첨가된 open loop 전달함수와 전체 전달함수
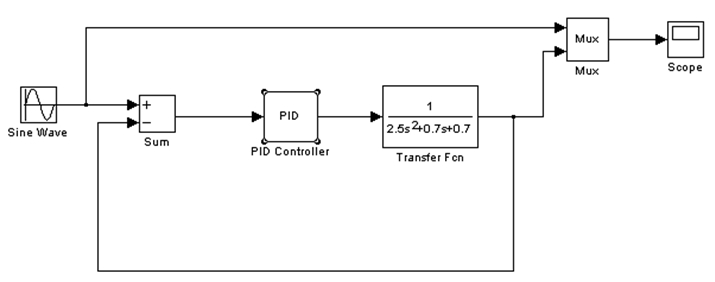
< Fig04. PID gain이 첨가된 Block Diagram >
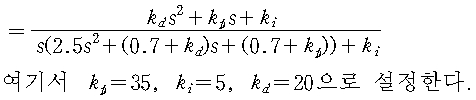
1) 먼저 open loop를 이용해서 bode 선도를 그리면 아래와 같다.
gain margin=무한대(∞)이고, phase margin=79.8426
< Fig05. PID gain이 첨가된 open loop 전달함수의 bode 선도 >
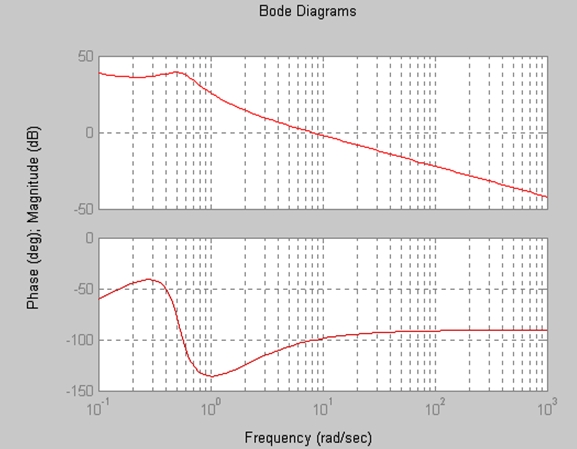
2) 폐루프를 이용해서 bode 선도를 그리면 아래와 같다.
cutoff frequency=20rad/sec이므로 Hertz로 나타내면 20/2π=3hertz이다.
phase는 1rad/sec까지는 입력과 출력의 위상차이가 “0”이다. 그 이상의 주파수에서는 입력과 출력의 위상차이가 난다.
< Fig06. PID gain이 첨가된 closed loop 전달함수의 bode 선도 >
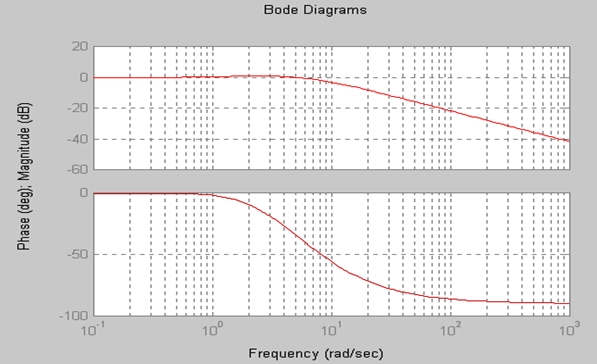
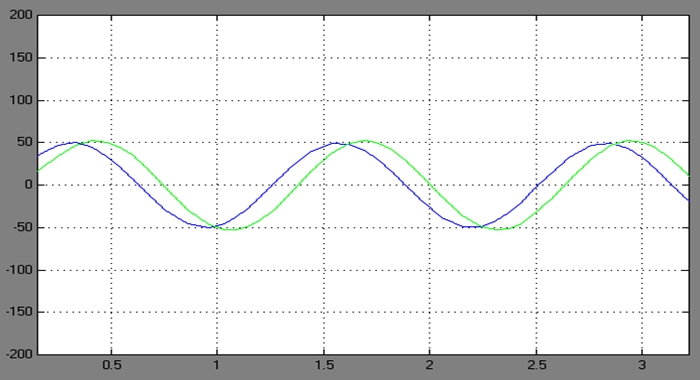
2-1) 진폭이 50, 주파수가 1rad/sec일 때는 아래그림과 같다.
위의 폐루프 bode 선도가 나타내는 것처럼 입력의 진폭과 출력의 진폭이 일치하고, 입력의 위상과 출력의 위상이 일치한다.
< Fig07. 진폭이 50, 주파수가 1rad/sec일 때 입력과 출력 >
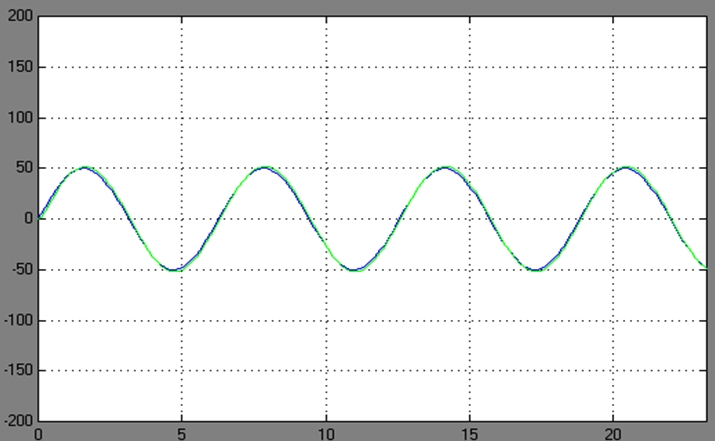
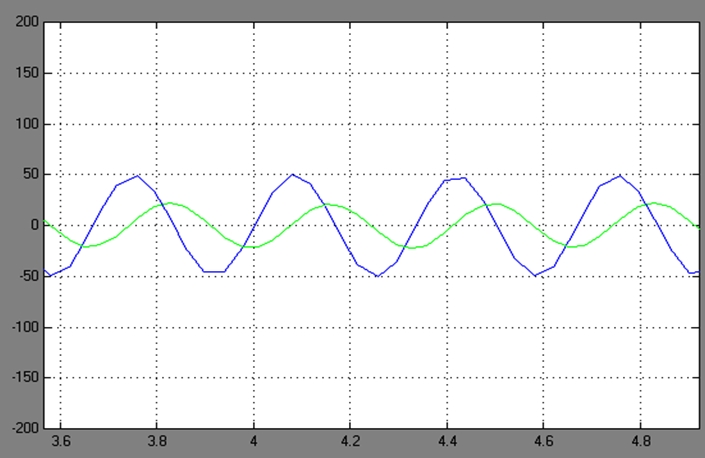
2-2) 진폭이 50, 주파수가 5rad/sec일 때는 아래그림과 같다.
bode 선도가 나타내는 것처럼 입력진폭 보다 출력진폭의 크기가 조금 더 커다. 그리고 출력 위상의 지연이 생긴다.
< Fig08. 진폭이 50, 주파수가 5rad/sec일 때 입력과 출력 >
2-3) 진폭이 50, 주파수가 3hertz일 때는 아래그림과 같다.
< Fig09. 진폭이 50, 주파수가 3hertz일 때 입력과 출력 >
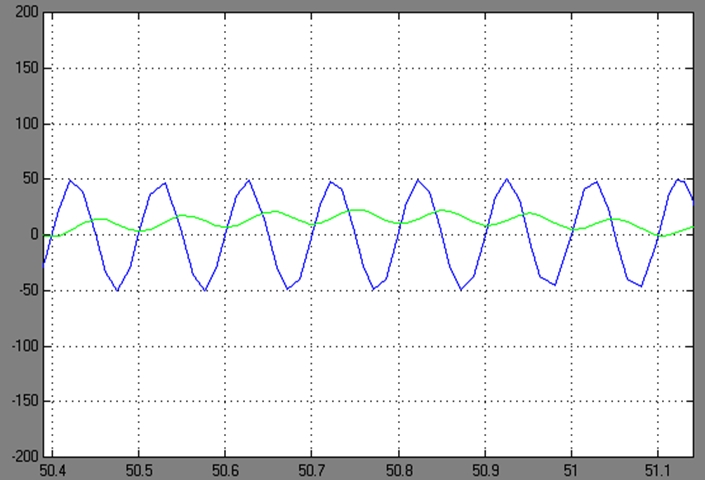
2-4) 진폭이 50, 주파수가 10hertz일 때는 아래그림과 같다.
출력의 진폭과 위상이 입력의 진폭-위상과 큰 차이가 있음을 알 수 있다.
자동제어의 기본개념 - 블럭 다이어그램
자동제어의 기본개념 - 블럭 다이어그램 1. 제어시스템1) 분류고전제어 이론이 단지 선형 시불변(LTI) 일입력 일출력(SISO) 시스템에만 적용될 수 있는 반면에, 현대 제어이론은 선형, 비선형,
electriceng.tistory.com
https://electriceng.tistory.com/1171
자동제어의 기본개념 - 주파수 응답해석
자동제어의 기본개념 - 주파수 응답해석 1. 주파수 응답해석 2차 시스템의 시간응답은 폐루프 주파수 응답의 Mr과 ωr을 구함으로써 정확하게 예측할 수 있다. 고차 시스템에서는 이들의 상
electriceng.tistory.com
https://electriceng.tistory.com/1173
자동제어의 기본개념 - 상태공간에서 제어 시스템해석
자동제어의 기본개념 - 상태공간에서 제어 시스템해석 1. 상태공간에서 제어 시스템해석1) 상태공간 표현법의 장점① 방정식이 시간영역에서 표현된다.② MIMO, 시변, 비선형 시스템의 해석이
electriceng.tistory.com
https://electriceng.tistory.com/1174
자동제어의 기본개념 - Lyapunov 안정도 해석
자동제어의 기본개념 - Lyapunov 안정도 해석 1. Comments regarding state space design개루프의 pole, zero가 어디에 위치하든지 폐루프의 pole을 임의의 위치로 이동시킬 수 있다. 제어설계의 관점에서 obs
electriceng.tistory.com
'공사교육자료 > 전기 - 공사교육' 카테고리의 다른 글
| 자동제어의 기본개념 - Lyapunov 안정도 해석 (0) | 2024.05.20 |
|---|---|
| 자동제어의 기본개념 - 상태공간에서 제어 시스템해석 (0) | 2024.05.17 |
| 자동제어의 기본개념 - 주파수 응답해석 (1) | 2024.05.14 |
| 자동제어의 기본개념 - 블럭 다이어그램 (0) | 2024.05.13 |
| 한전 관로공사 설계기준 (DS-5200) - 관로 도통시험 등 (0) | 2024.05.10 |
