자동제어의 기본개념 - 주파수 응답해석
자동제어의 기본개념 - 주파수 응답해석
1. 주파수 응답해석
2차 시스템의 시간응답은 폐루프 주파수 응답의 Mr과 ωr을 구함으로써 정확하게 예측할 수 있다. 고차 시스템에서는 이들의 상호관계가 더욱 복잡하여 주파수 응답으로부터 과도 응답으로부터 과도 응답을 쉽게 예측할 수 없게 된다. 왜냐하면 추가된 극(pole)이 2차시스템에 존재하는 계단응답과 주파수응답 사이의 상호관계를 변화시키기 때문이다. 정확한 상호관계를 구하기 위해서 수학적 기법을 쓸 수 있지만 이것은 대단히 귀찮은 작업이며 이렇게 구하는 것은 별로 실제적이지 못하다. 2차 시스템의 과도응답-주파수응답 사이에 존재하는 상호관계를 고차 시스템에 응용할 수 있는지의 여부는 고차시스템내의 켤레복소수 폐루프 극의 주요쌍이 존재하는가에 좌우된다.
명백히 고차 시스템의 주파수 응답이 한 쌍의 켤레 복소수 폐루프 극에 의해서 지배된다면 2차 시스템에 존재하는 과도응답-주파수응답의 상호관계를 고차시스템으로 확장시킬 수 있게된다.
1) bode 선도를 이용한 전달함수 표기
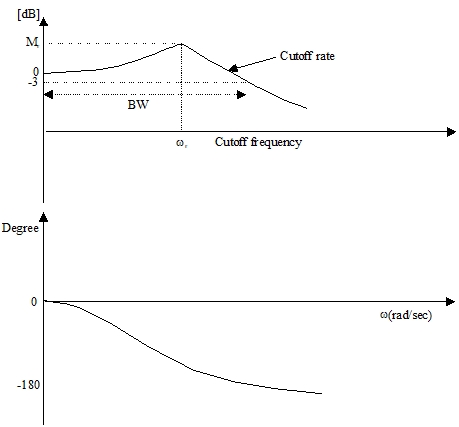
< Fig01. Typical gain-phase characteristic of control system >
시스템의 주파수 응답은 삼각함수 입력신호에 대한 시스템의 정상상태 응답

안정한 시스템의 정상상태에서는

위와 같이 주파수는 변함이 없고 진폭과 위상만 변한다.

이고 입력 사인파에 대한 출력 사인파의 크기비,
이고 입력 사인파에 대한 출력 사인파의 위상차.
음의 위상각을 위상 뒤짐 (phase lag), 양의 위상각을 위상 앞섬(phase lead)이라 한다.
· 폐루프 전달함수

의 S=σ+jω 대신 S=jω를 대입한 것이 주파수 전달함수이다.
· 폐루프 주파수 전달함수

위의 주파수 전달함수를 bode 선도를 이용하여 각각 크기 ΙT(jω)Ι 와∠T(jω)의 그래프를 그릴 수 있다.
- 크기와 각도를 분리해서 그린 것
- 가로축은 주파수의 대수(log)눈금(이득 곡선이 직선이 되게 한다)
- 세로축은
① 이득곡선

② 위상곡선

- 이득특성 : 주파수를 0에서 ∞까지 변화시킬 때 ΙT(jω)Ι의 변화
- 위상특성 : 주파수를 0에서 ∞까지 변화 변화시킬 때 ∠T(jω)의 변화
- 첨두 공진치(Mr) : ΙT(jω)Ι의 최대치, 시간영역에서 최대 overshoot에 해당
- 공진 주파수(Wr) : Mr이 일어나는 주파수.
- Cutoff rate(차단율)
ΙT(jω)Ι의 기울기 : Mr 값은 상대 안정도를 나타낸다. Mr의 값이 0.4 < ζ < 0.7의 감쇠비에 해당하는 범위 즉, 1.0 < Mr < 1.4에 있을 때 만족스러운 과도응답의 성능을 얻을 수 있다. 공진주파수 의 크기는 과도응답의 속도를 나타낸다. ωr의 값이 클수록 시간응답이 빨라진다.
· 차단주파수(cutoff frequency)
bode 선도의 이득곡선이 직선으로 그려지나 기울기가 변할 때의 주파수로 주파수가 “0”일 때의 크기보다 3dB작을 때의 주파수ωb를 말한다.
· 대역폭(bandwidth)
주파수 범위 0 ≤ ω ≤ ωb내에서는 폐루프의 크기가 -3dB이하로 떨어 지지 않으며, 이 범위를 대역폭이라 한다. 대역폭은 시스템이 입력 사인파를 얼마나 잘 추적할 수 있는가를 나타낸다. 차단율( cutoff rate ): 차단주파수 부근에서 곡선의 기울기이다. 차단율은 신호와 잡음을 구별하는 시스템의 능력을 나타낸다.

사진 설명을 입력하세요.
대역폭이 크면 상대적으로 높은 주파수가 통과하므로 빠른 상승에 해당 (과도 응답 특성 결정)
2) Mr, ωr and bandwidth of prototype second-order system
원형 2차 시스템의 전달함수의 S=jω를 대입하면 전달함수는
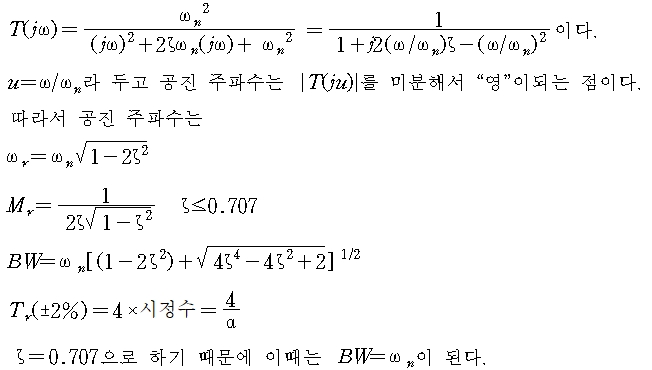
사진 설명을 입력하세요.
2. 안정도 해석
1) 복소평면에서의 안정도 해석
선형 폐루프 시스템의 안정도는 S-평면에서 폐루프 극의 위치로부터 결정될 수 있다. 선형시스템이 안정한가 불안정한가는 시스템 그 자체의 성질이며, 시스템의 입력과는 무관하다. 입력함수의 극(pole)은 시스템의 안정도 성질에는 영향을 미치지 않고 단지 해의 정상상태응답에만 영향을 미친다. 모든 폐루프 극이 S-평면의 좌반부에 있다고 해서 과도응답 특성을 만족시키지 않는다. 만약 주요 켤례복소 폐루프 극이 jω축 가까이 있으면, 과도응답은 심한 진동을 나타내거나 매우 느리게 된다. 그러므로 잘 감쇠하고 빠른 과도응답을 얻기 위해서는 시스템의 폐루프 극이 특별한 영역안에 있어야한다. 예를 들면 그림(Fig02)의 빗금으로 둘러싸인 영역 같은 것이다.
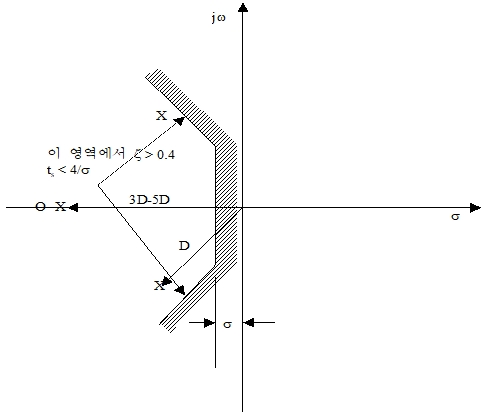
사진 설명을 입력하세요.
< Fig02. 조건 ζ > 0.4와 ts < 4/α 를 만족시키는 복소평면상의 영역 >
2) 근궤적 해석을 이용한 안정도 판별(Root-Locus Analysis)
근궤적 방법은 특성 방정식의 근을 시스템 매개변수 값의 변화에 따라 그린 것으로 기본 아이디어는 루프 전달함수가 “-1”이 되는 S의 값이 시스템의 특성방정식의 근을 만족시켜야한다는 것이다.
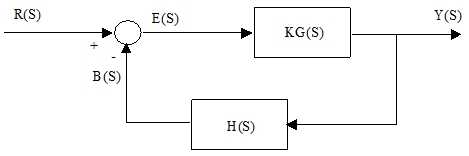
사진 설명을 입력하세요.
< Fig03. closed loop system >
위 와 같은 일반적 시스템을 고려해보자. 폐루프 전달함수는

사진 설명을 입력하세요.
이다. 이 폐루프 시스템의 특성방정식은 위 식 우변의 분모를 “0"으로 둠으로써 얻어진다.

사진 설명을 입력하세요.
위 식에서 매개변수 K의 변화에 대한 근을 그리면 근궤적이 되고 시스템이 안정할 K의 범위를 알 수 있다.
3) Nyquist 선도를 이용한 안정도 판별법
단지 시스템의 안정 여부만이 아니라 안정한 시스템의 안정한 정도를 함께 나타낸다. 아래와 같은 폐루프 전달함수가 있을 때

사진 설명을 입력하세요.
특성 방정식의 근은 1 + G(S)H(S) = 0이고 루프 전달함수는 L(S) = G(S)H(S)이다.
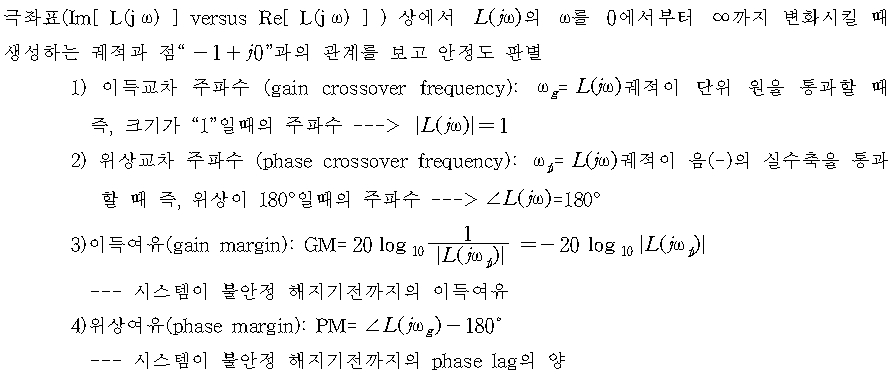
사진 설명을 입력하세요.
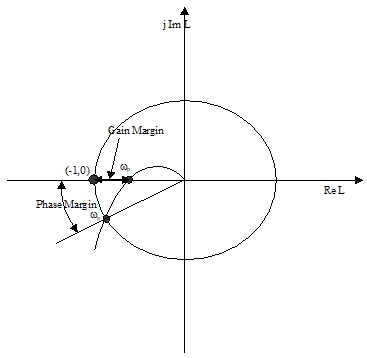
사진 설명을 입력하세요.
< Fig.04. Nyquist Plot on polar plot >
4) bode 선도를 이용한 안정도 판별
- open loop 전달함수를 이용한다.
- Nyquist 선도가 이득과 위상을 하나의 그래프에 나타낸 반면에 bode 선도는 이득과 위상 을 분리해서 나타내었다.
- 가로축은 주파수의 대수(log)눈금(이득 곡선이 직선이 되게 한다)
- 세로축은
① 이득곡선

사진 설명을 입력하세요.
② 위상곡선

사진 설명을 입력하세요.
L(jω)평면에서 점 (-1,0) 은 bode 선도에서 이득이 0[dB], 위상각이 180°에 해당한다.
- 이득여유(GM): 위상곡선 -180°즉, 위상교차주파수(Wp)에 대응하는 이득곡선상의 이득
- 위상여유(PM:) 이득곡선 0[dB] 즉, 이득교차 주파수(Wg)에 대응하는 위상 곡선상의 위상
· closed loop system은 open loop system 보다 빠르고, 큰 overshoot를 가진다.
· Decibel의 정의:
사진 설명을 입력하세요.
여기서 Pi, Pa는 각각 입력전력과 출력전력이다.
위 식에서

사진 설명을 입력하세요.
이므로 아래와 같이

사진 설명을 입력하세요.
· 두 주파수간의 비가 “10”일 때의 간격을 decade라하고, 두 주파수간의 비가 “2”일때를 octave라 한다.
· S-평면의 오른쪽 반평면에 극이나 영점을 갖지 않는 전달함수는 최소 위상함수이며, S-평면의 오른쪽 반평면에 극 또는 영점을 갖는 전달함수는 비최소위상 전달함수 이다. 같은 크기특성을 가진 시스템에 대해서는 최소위상 전달함수의 위상각의 범위가 모든이 러한 시스템에 대해 최소이며, 임임의 비최소위상 전달함수의 위상각의 범위는 이 최소 값보다 크다. 최소 위상시스템에 대해서는 크기곡선만으로 전달함수를 유일하게 결정할 수 있다. 비최소 위상시스템은 응답초기의 불완전한 거동 때문에 응답이 느리다.

사진 설명을 입력하세요.
< Fig05. Determination of gain margin and phase margin on the bode plot >
- 전달함수의 실험적 결정에 대한 몇 가지 참고 사항
① 주파수 응답 시험을 하는데는 적절한 사인파 신호 발생기가 반드시 필요하다. 실 험에 필요한 주파수영역은 시정수가 큰 시스템에서는 약 0.001-10Hz 이고, 시정수 가 작은 시스템에서는 약 0.1-1000Hz이다.
② 일반적으로 정확한 위상차 측정보다는 정확한 진폭의 측정이 더욱 용이하다. 위상 차 측정은 계측이나 실험결과의 잘못된 판독으로 인해 오차를 내포 할 수 있다.
③ 물리적 시스템은 여러 가지 종류의 비선형성을 가지고 있다. 그러므로 사인파 입력 신호의 진폭에 대해서 주의 깊게 고찰할 필요가 있다. 입력신호의 진폭이 너무 크 면 시스템은 포화 될 것이며 주파수 응답실험은 부정확한 결과를 초래할 것이다. 반면에 아주 작은 신호는 불감대(dead zone)로 인한 오차를 일으킨다.
자동제어의 기본개념 - 블럭 다이어그램
자동제어의 기본개념 - 블럭 다이어그램 1. 제어시스템1) 분류고전제어 이론이 단지 선형 시불변(LTI) 일입력 일출력(SISO) 시스템에만 적용될 수 있는 반면에, 현대 제어이론은 선형, 비선형,
electriceng.tistory.com
https://electriceng.tistory.com/1172
자동제어의 기본개념 - 보상기
자동제어의 기본개념 - 보상기 1. 보상기1) S-평면의 좌반부에 있는 pole-zero는 cancel 해도 되지만 우반부의 있는 pole-zero는 cancel 하지 말아야한다. 그 이유 중 하나는 우반부의 pole-zero는 실제시스템
electriceng.tistory.com
https://electriceng.tistory.com/1173
자동제어의 기본개념 - 상태공간에서 제어 시스템해석
자동제어의 기본개념 - 상태공간에서 제어 시스템해석 1. 상태공간에서 제어 시스템해석1) 상태공간 표현법의 장점① 방정식이 시간영역에서 표현된다.② MIMO, 시변, 비선형 시스템의 해석이
electriceng.tistory.com
https://electriceng.tistory.com/1174
자동제어의 기본개념 - Lyapunov 안정도 해석
자동제어의 기본개념 - Lyapunov 안정도 해석 1. Comments regarding state space design개루프의 pole, zero가 어디에 위치하든지 폐루프의 pole을 임의의 위치로 이동시킬 수 있다. 제어설계의 관점에서 obs
electriceng.tistory.com
'공사교육자료 > 전기 - 공사교육' 카테고리의 다른 글
| 자동제어의 기본개념 - 상태공간에서 제어 시스템해석 (0) | 2024.05.17 |
|---|---|
| 자동제어의 기본개념 - 보상기 (0) | 2024.05.16 |
| 자동제어의 기본개념 - 블럭 다이어그램 (0) | 2024.05.13 |
| 한전 관로공사 설계기준 (DS-5200) - 관로 도통시험 등 (0) | 2024.05.10 |
| 한전 관로공사 설계기준 (DS-5200) - 관로설치 (0) | 2024.05.09 |
